Comentarii Adauga Comentariu
_ Un robot pentru a explora terenul periculos al lunii
_ Un robot Hopper pentru a explora terenul periculos al lunii
Intuitive Machines a avut recent o descoperire majoră, devenind cu succes prima entitate neguvernamentală care a aterizat pe Lună în februarie. Cel puțin aterizarea a fost parțial reușită – landerul Odysseus al companiei a ajuns de partea ei, deși instrumentele și legăturile sale de comunicare au rămas cel puțin parțial funcționale. Misiunea respectivă, numită IM-1, a fost prima dintr-o serie de misiuni ambițioase pe care compania le-a planificat. Și au lansat recent o lucrare la conferința LPSC 2024, care detaliază caracteristicile unui robot unic, care va face o plimbare în următoarea sa misiune pe lună.
Cunoscut sub numele de South Pole Hopper (sau S.P. Hopper), robotul va fi primul dintr-o nouă clasă numită µNova. Cântărind doar 35 kg și având o înălțime de numai 70 cm, această navă miniaturizată este o navă spațială de sine stătătoare care poate funcționa complet autonom. Trebuie să facă acest lucru pentru a-și îndeplini misiunea de a explora regiunea din jurul regiunilor în umbră permanentă (PSR) de la polul sud lunar.
În mod concret, ambarcațiunea are patru obiective distincte:
Niciuna. dintre aceste obiective individual necesită cea mai notabilă caracteristică a lui S.P. Hopper - dar cu siguranță ar fi util să le finalizeze - poate „sări” prin împingerea de pe suprafața lunii și aterizarea într-o zonă pe care o alege complet autonom – chiar și într-un PSR. Poate face acest lucru la un unghi de până la 10 grade, compania se grăbește să sublinieze, având în vedere dificultățile sale recente cu unghiul navei spațiale.
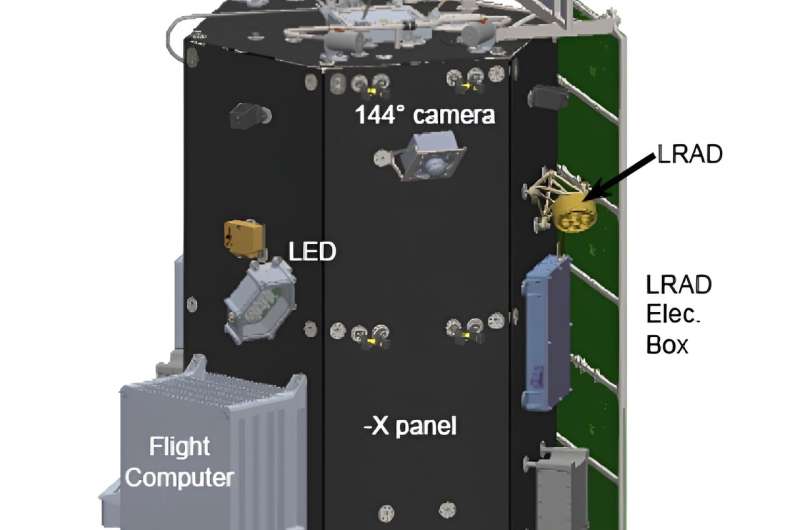
Lucrul descrie mai multe caracteristici tehnice ale buncărului, inclusiv faptul că va folosi un sistem LTE fără fir pentru a comunica. Pentru a colecta datele necesare misiunii sale, dispune de trei instrumente științifice principale: un set de camere CMOS, a căror sarcină principală este de a ajuta la navigarea autonomă, dar poate și trimite imagini înapoi pe Pământ pentru a fi analizate; sistemul de senzori cu termopilul LRAD; conceput pentru a capta măsurătorile luminozității regolitului și PLWS, un spectrometru de neutroni în miniatură, conceput special pentru a căuta hidrogen în spațiu.
Cu toate acestea, poate cea mai interesantă parte a lucrării detaliază planul său de zbor. S. P. Hopper este proiectat să facă 5 - posibil 6 - hamei atunci când aterizează la polul sud lunar. Primul va fi un „hop de punere în funcțiune” care va traversa doar 20 m sau cam așa ceva. Urmează un hop „dovadă de concept” de 100 m, care va demonstra că un robot stropitor este un mod viabil de transport pe Lună.
În urma acestor zboruri inițiale, S. P. Hopper va zbura aproximativ 300 m până la marginea craterului Marston, parte din creasta Shackleton—de Gerlache. Apoi va zbura în crater în sine, care este un PSR, și apoi va zbura înapoi pe creastă. Dacă a mai rămas suficient combustibil, Intuitive Machines plănuiește un al șaselea zbor de explorare pentru a vedea orice interesant în apropiere.
În prezent, IM-2, zborul care va duce S.P. Hopper la Polul Sud, este programat pentru lansare cândva în acest an. Având în vedere succesul relativ al Mașinii Intuitive cu aterizatorul Odysseus, există și mult optimism cu privire la succesul acestei misiuni. Deocamdată, totuși, va trebui să așteptăm și să vedem dacă compania poate realiza o misiune de continuare și mai de succes.












































Comentarii:
Adauga Comentariu